
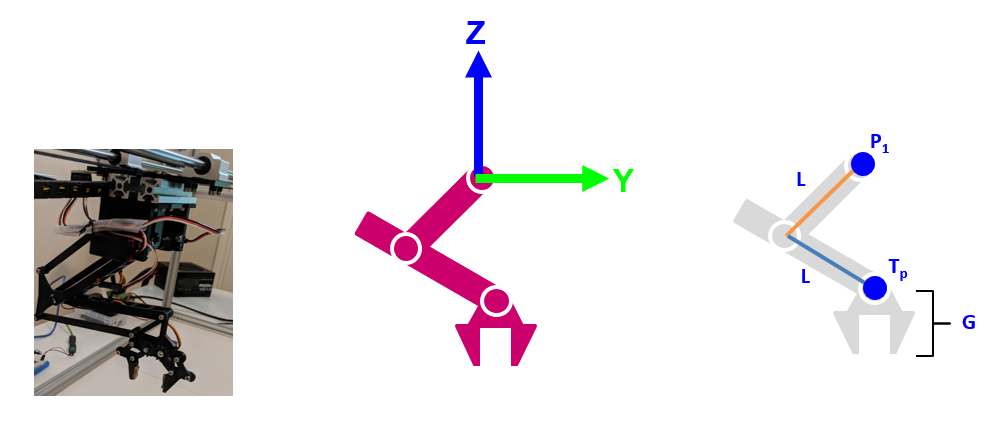
I aimed to built the simplest robot that could prove to be useful in light use cases and my design has two rotating axis that control the Y and Z position, and a linear axis that controls the X position.
For movements, in it’s crudest form the robot arm requires 2 angle inputs (for the servo motors) and number of steps and direction. The X-axis motion is extremely straightforward and can be easily be identified by reading the code, so I won’t cover it in this blog. I will focus on the Y, Z motion.
It is very counter-intuitive to provide angles as inputs and it makes it extremely hard to control the robot. The goals is to provide the robot with a set of coordinates, like Y=5 and Z=-6 and have the program itself figure out the position required by the servos. In the industry this is commonly known as Inverse Kinematics, and the case I’ll describe here, is probably one of the simplest one can find.
Continue reading Converting Y, Z coordinates into Angles for a two axis Robot Arm